A Coding Guide to Build a Procedural Memory Agent That Learns, Stores, Retrieves, and Reuses Skills as Neural Modules Over Time
In this tutorial, we explore how an intelligent agent can gradually form procedural memory by learning reusable skills directly from its interactions with an environment. We design a minimal yet powerful framework in which skills behave like neural modules: they store action sequences, carry contextual embeddings, and are retrieved by similarity when a new situation resembles an experience. As we run our agent through multiple episodes, we observe how its behaviour becomes more efficient, moving from primitive exploration to leveraging a library of skills that it has learned on its own. Check out the FULL CODES here.
import matplotlib.pyplot as plt
from collections import defaultdict
class Skill:
def __init__(self, name, preconditions, action_sequence, embedding, success_count=0):
self.name = name
self.preconditions = preconditions
self.action_sequence = action_sequence
self.embedding = embedding
self.success_count = success_count
self.times_used = 0
def is_applicable(self, state):
for key, value in self.preconditions.items():
if state.get(key) != value:
return False
return True

def __repr__(self):
return f”Skill({self.name}, used={self.times_used}, success={self.success_count})”
class SkillLibrary:
def __init__(self, embedding_dim=8):
self.skills = []
self.embedding_dim = embedding_dim
self.skill_stats = defaultdict(lambda: {“attempts”: 0, “successes”: 0})
def add_skill(self, skill):
for existing_skill in self.skills:
if self._similarity(skill.embedding, existing_skill.embedding) > 0.9:
existing_skill.success_count += 1
return existing_skill
self.skills.append(skill)
return skill
def retrieve_skills(self, state, query_embedding=None, top_k=3):
applicable = [s for s in self.skills if s.is_applicable(state)]
if query_embedding is not None and applicable:
similarities = [self._similarity(query_embedding, s.embedding) for s in applicable]
sorted_skills = [s for _, s in sorted(zip(similarities, applicable), reverse=True)]
return sorted_skills[:top_k]
return sorted(applicable, key=lambda s: s.success_count / max(s.times_used, 1), reverse=True)[:top_k]
def _similarity(self, emb1, emb2):
return np.dot(emb1, emb2) / (np.linalg.norm(emb1) * np.linalg.norm(emb2) + 1e-8)
def get_stats(self):
return {
“total_skills”: len(self.skills),
“total_uses”: sum(s.times_used for s in self.skills),
“avg_success_rate”: np.mean([s.success_count / max(s.times_used, 1) for s in self.skills]) if self.skills else 0
}
We define how skills are represented and stored in a memory structure. We implement similarity-based retrieval so that the agent can match a new state with past skills using cosine similarity. As we work through this layer, we see how skill reuse becomes possible once skills acquire metadata, embeddings, and usage statistics. Check out the FULL CODES here.
def __init__(self, size=5):
self.size = size
self.reset()
def reset(self):
self.agent_pos = [0, 0]
self.goal_pos = [self.size-1, self.size-1]
self.objects = {“key”: [2, 2], “door”: [3, 3], “box”: [1, 3]}
self.inventory = []
self.door_open = False
return self.get_state()
def get_state(self):
return {
“agent_pos”: tuple(self.agent_pos),
“has_key”: “key” in self.inventory,
“door_open”: self.door_open,
“at_goal”: self.agent_pos == self.goal_pos,
“objects”: {k: tuple(v) for k, v in self.objects.items()}
}
def step(self, action):
reward = -0.1
if action == “move_up”:
self.agent_pos[1] = min(self.agent_pos[1] + 1, self.size – 1)
elif action == “move_down”:
self.agent_pos[1] = max(self.agent_pos[1] – 1, 0)
elif action == “move_left”:
self.agent_pos[0] = max(self.agent_pos[0] – 1, 0)
elif action == “move_right”:
self.agent_pos[0] = min(self.agent_pos[0] + 1, self.size – 1)
elif action == “pickup_key”:
if self.agent_pos == self.objects[“key”] and “key” not in self.inventory:
self.inventory.append(“key”)
reward = 1.0
elif action == “open_door”:
if self.agent_pos == self.objects[“door”] and “key” in self.inventory:
self.door_open = True
reward = 2.0
done = self.agent_pos == self.goal_pos and self.door_open
if done:
reward = 10.0
return self.get_state(), reward, done
We construct a simple environment in which the agent learns tasks such as picking up a key, opening a door, and reaching a goal. We use this environment as a playground for our procedural memory system, allowing us to observe how primitive actions evolve into more complex, reusable skills. The environment’s structure helps us observe clear, interpretable improvements in behaviour across episodes. Check out the FULL CODES here.
def __init__(self, env, embedding_dim=8):
self.env = env
self.skill_library = SkillLibrary(embedding_dim)
self.embedding_dim = embedding_dim
self.episode_history = []
self.primitive_actions = [“move_up”, “move_down”, “move_left”, “move_right”, “pickup_key”, “open_door”]
def create_embedding(self, state, action_seq):
state_vec = np.zeros(self.embedding_dim)
state_vec[0] = hash(str(state[“agent_pos”])) % 1000 / 1000
state_vec[1] = 1.0 if state.get(“has_key”) else 0.0
state_vec[2] = 1.0 if state.get(“door_open”) else 0.0
for i, action in enumerate(action_seq[:self.embedding_dim-3]):
state_vec[3+i] = hash(action) % 1000 / 1000
return state_vec / (np.linalg.norm(state_vec) + 1e-8)
def extract_skill(self, trajectory):
if len(trajectory) < 2:
return None
start_state = trajectory[0][0]
actions = [a for _, a, _ in trajectory]
preconditions = {“has_key”: start_state.get(“has_key”, False), “door_open”: start_state.get(“door_open”, False)}
end_state = self.env.get_state()
if end_state.get(“has_key”) and not start_state.get(“has_key”):
name = “acquire_key”
elif end_state.get(“door_open”) and not start_state.get(“door_open”):
name = “open_door_sequence”
else:
name = f”navigate_{len(actions)}_steps”
embedding = self.create_embedding(start_state, actions)
return Skill(name, preconditions, actions, embedding, success_count=1)
def execute_skill(self, skill):
skill.times_used += 1
trajectory = []
total_reward = 0
for action in skill.action_sequence:
state = self.env.get_state()
next_state, reward, done = self.env.step(action)
trajectory.append((state, action, reward))
total_reward += reward
if done:
skill.success_count += 1
return trajectory, total_reward, True
return trajectory, total_reward, False
def explore(self, max_steps=20):
trajectory = []
state = self.env.get_state()
for _ in range(max_steps):
action = self._choose_exploration_action(state)
next_state, reward, done = self.env.step(action)
trajectory.append((state, action, reward))
state = next_state
if done:
return trajectory, True
return trajectory, False
We focus on building embeddings that encode the context of a state-action sequence, enabling us to meaningfully compare skills. We also extract skills from successful trajectories, transforming raw experience into reusable behaviours. As we run this code, we observe how simple exploration gradually yields structured knowledge that the agent can apply later. Check out the FULL CODES here.
agent_pos = state[“agent_pos”]
if not state.get(“has_key”):
key_pos = state[“objects”][“key”]
if agent_pos == key_pos:
return “pickup_key”
if agent_pos[0] < key_pos[0]:
return “move_right”
if agent_pos[0] > key_pos[0]:
return “move_left”
if agent_pos[1] < key_pos[1]:
return “move_up”
return “move_down”
if state.get(“has_key”) and not state.get(“door_open”):
door_pos = state[“objects”][“door”]
if agent_pos == door_pos:
return “open_door”
if agent_pos[0] < door_pos[0]:
return “move_right”
if agent_pos[0] > door_pos[0]:
return “move_left”
if agent_pos[1] < door_pos[1]:
return “move_up”
return “move_down”
goal_pos = (4, 4)
if agent_pos[0] < goal_pos[0]:
return “move_right”
if agent_pos[1] < goal_pos[1]:
return “move_up”
return np.random.choice(self.primitive_actions)
def run_episode(self, use_skills=True):
self.env.reset()
total_reward = 0
steps = 0
trajectory = []
while steps < 50:
state = self.env.get_state()
if use_skills and self.skill_library.skills:
query_emb = self.create_embedding(state, [])
skills = self.skill_library.retrieve_skills(state, query_emb, top_k=1)
if skills:
skill_traj, skill_reward, success = self.execute_skill(skills[0])
trajectory.extend(skill_traj)
total_reward += skill_reward
steps += len(skill_traj)
if success:
return trajectory, total_reward, steps, True
continue
action = self._choose_exploration_action(state)
next_state, reward, done = self.env.step(action)
trajectory.append((state, action, reward))
total_reward += reward
steps += 1
if done:
return trajectory, total_reward, steps, True
return trajectory, total_reward, steps, False
def train(self, episodes=10):
stats = {“rewards”: [], “steps”: [], “skills_learned”: [], “skill_uses”: []}
for ep in range(episodes):
trajectory, reward, steps, success = self.run_episode(use_skills=True)
if success and len(trajectory) >= 3:
segment = trajectory[-min(5, len(trajectory)):]
skill = self.extract_skill(segment)
if skill:
self.skill_library.add_skill(skill)
stats[“rewards”].append(reward)
stats[“steps”].append(steps)
stats[“skills_learned”].append(len(self.skill_library.skills))
stats[“skill_uses”].append(self.skill_library.get_stats()[“total_uses”])
print(f”Episode {ep+1}: Reward={reward:.1f}, Steps={steps}, Skills={len(self.skill_library.skills)}, Success={success}”)
return stats
We define how the agent chooses between using known skills and exploring with primitive actions. We train the agent across several episodes and record the evolution of learned skills, usage counts, and success rates. As we examine this part, we observe that skill reuse reduces episode length and improves overall rewards. Check out the FULL CODES here.
fig, axes = plt.subplots(2, 2, figsize=(12, 8))
axes[0, 0].plot(stats[“rewards”])
axes[0, 0].set_title(“Episode Rewards”)
axes[0, 1].plot(stats[“steps”])
axes[0, 1].set_title(“Steps per Episode”)
axes[1, 0].plot(stats[“skills_learned”])
axes[1, 0].set_title(“Skills in Library”)
axes[1, 1].plot(stats[“skill_uses”])
axes[1, 1].set_title(“Cumulative Skill Uses”)
plt.tight_layout()
plt.savefig(“skill_learning_stats.png”, dpi=150, bbox_inches=”tight”)
plt.show()
if __name__ == “__main__”:
print(“=== Procedural Memory Agent Demo ===\n”)
env = GridWorld(size=5)
agent = ProceduralMemoryAgent(env)
print(“Training agent to learn reusable skills…\n”)
stats = agent.train(episodes=15)
print(“\n=== Learned Skills ===”)
for skill in agent.skill_library.skills:
print(f”{skill.name}: {len(skill.action_sequence)} actions, used {skill.times_used} times, {skill.success_count} successes”)
lib_stats = agent.skill_library.get_stats()
print(f”\n=== Library Statistics ===”)
print(f”Total skills: {lib_stats[‘total_skills’]}”)
print(f”Total skill uses: {lib_stats[‘total_uses’]}”)
print(f”Avg success rate: {lib_stats[‘avg_success_rate’]:.2%}”)
visualize_training(stats)
print(“\n✓ Skill learning complete! Check the visualization above.”)
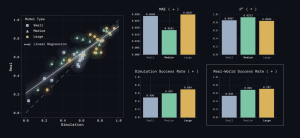
We bring everything together by running training, printing learned skills, and plotting behaviour statistics. We visualize the trend in rewards and how the skill library grows over time. By running this snippet, we complete the lifecycle of procedural memory formation and confirm that the agent learns to behave more intelligently with experience.
In conclusion, we see how procedural memory emerges naturally when an agent learns to extract skills from its own successful trajectories. We observe how skills are gained, structure, metadata, embeddings, and usage patterns, allowing the agent to reuse them efficiently in future situations. Lastly, we appreciate how even a small environment and simple heuristics lead to meaningful learning dynamics, giving us a concrete understanding of what it means for an agent to develop reusable internal competencies over time.
Check out the FULL CODES here. Feel free to check out our GitHub Page for Tutorials, Codes and Notebooks. Also, feel free to follow us on Twitter and don’t forget to join our 100k+ ML SubReddit and Subscribe to our Newsletter. Wait! are you on telegram? now you can join us on telegram as well.
Asif Razzaq is the CEO of Marktechpost Media Inc.. As a visionary entrepreneur and engineer, Asif is committed to harnessing the potential of Artificial Intelligence for social good. His most recent endeavor is the launch of an Artificial Intelligence Media Platform, Marktechpost, which stands out for its in-depth coverage of machine learning and deep learning news that is both technically sound and easily understandable by a wide audience. The platform boasts of over 2 million monthly views, illustrating its popularity among audiences.